Schema
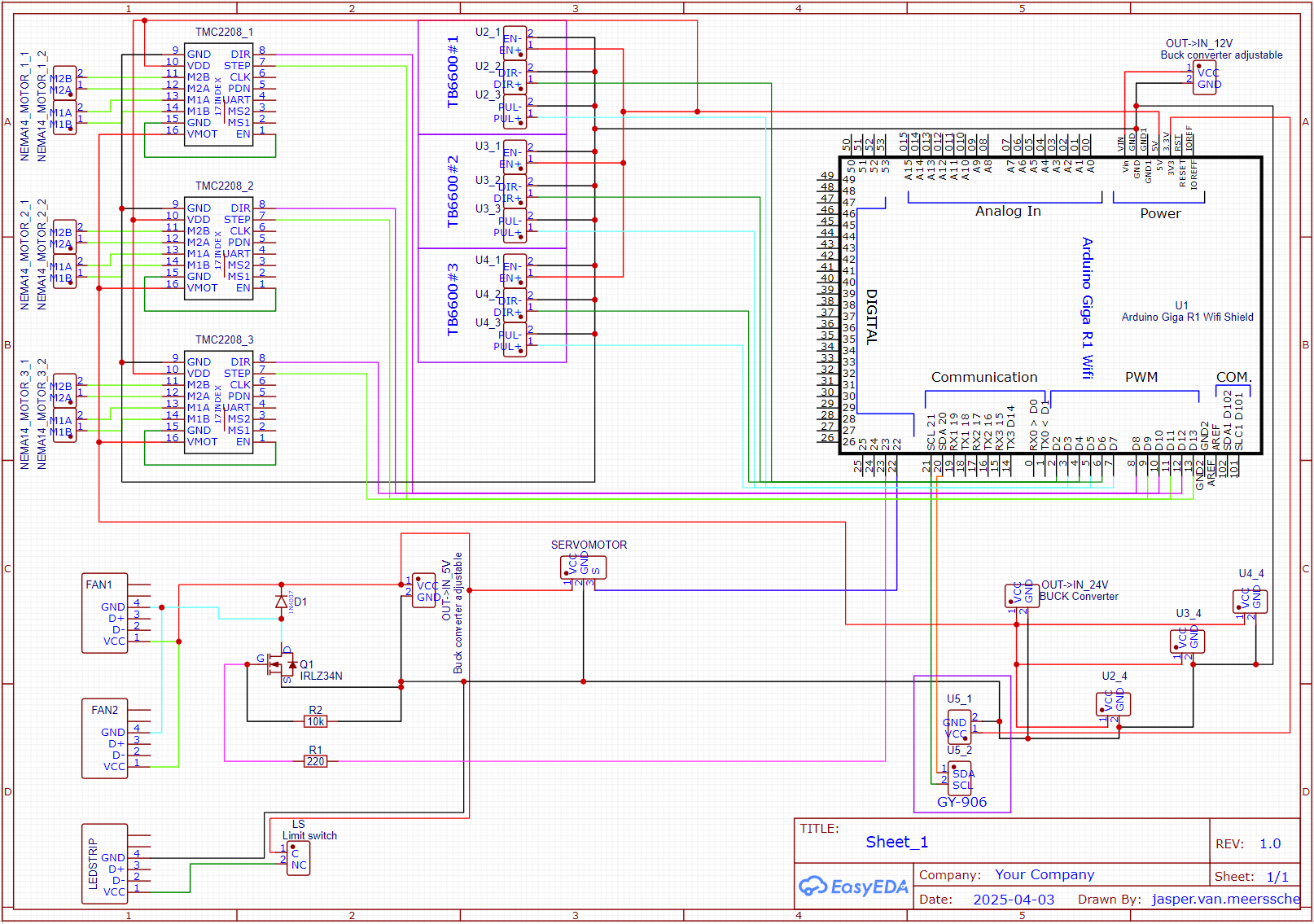
Functie belangrijke onderdelen
- Controller: DUALSHOCK 4 bestuurt alle bewegingen van de arm. Deze wordt rechtstreeks aangesloten op de Arduino.
- Arduino Giga R1 WiFi: Verwerkt alle inputs en stuurt de motoren aan.
- Motor Drivers: Controleren de stroom naar elke stappenmotor.
- Stappenmotoren: Voor de verschillende assen (basis, schouder, elleboog, pols).
- Servomotor: Voor de werking van de grijper.
- Noodstop: Onderbreekt onmiddellijk de stroom voor veiligheid.
Extra Informatie
Hier zijn de gebruikte soft- en hardware:
Behuizing:
- MDF 18mm
- PLA (geprinte onderdelen)
Besturing:
- Arduino Giga R1 WiFi
- DUALSHOCK 4 controller
- NEMA 14 stappenmotor met driver
- NEMA 17 stappenmotor met driver
- MG995 servomotor voor de gripper
Gebruikte software:
- Arduino IDE (voor de programmering)
- Blender (voor het ontwerpen van de 3D onderdelen)