Mijn Eindwerk
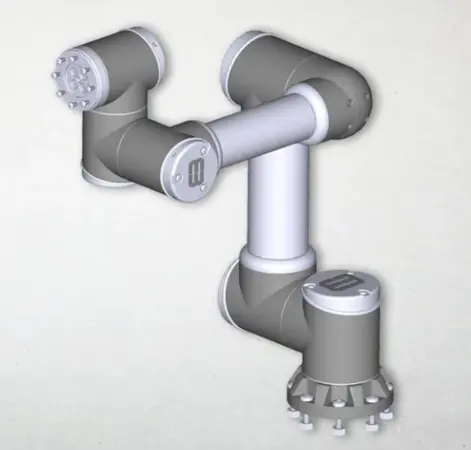
Dit jaar heb ik een robotarm gebouwd, een project waarin zowel mechanische als elektronische componenten samenkomen. Ik begon met het 3D-printen van de onderdelen en ontwierp een houten behuizing om de knoppen en aansluitingen netjes te integreren. De arm wordt aangedreven door zes stappenmotoren, elk met een eigen driver, en een servomotor voor de gripper en wordt bestuurd door een Arduino Giga R1 WiFi. De keuze voor deze Arduino werd bepaald door de extra WiFi- en Bluetooth-mogelijkheden, die de functionaliteit van het project uitbreiden.
De besturing verloopt via een DUALSHOCK 4-controller, die via USB met de Arduino verbonden is. De knoppen op de controller regelen de bewegingen van de arm, en een specifieke knop activeert de gripper aan het uiteinde. Om de veiligheid te garanderen, heb ik ook een noodstop voorzien, zodat de arm onmiddellijk kan worden uitgeschakeld indien nodig. Dit project combineert mijn kennis van hardware en software en vormt een praktische en leerzame uitdaging.